
Thay vì thiết kế các thiết bị truyền động theo kinh nghiệm, nhóm nghiên cứu muốn tạo ra một công cụ mà bạn có thể đưa vào một chuyển động và nó sẽ chỉ ra cách thiết kế các thiết bị truyền động để đạt được chuyển động đó.
Thiết kế một robot mềm có thể uốn cong như một ngón tay hoặc đầu gối có thể có vẻ đơn giản nhưng sự chuyển động thực sự là vô cùng phức tạp.Thiết kế này quá phức tạp vì một loại thiết bị truyền động không đủ để tạo ra chuyển động phức tạp, cần phài có một chuỗi các đoạn thiết bị truyền động, từng đoạn thực hiện một chuyển động khác nhau và phải dẫn động chúng sử dụng một đầu vào duy nhất.
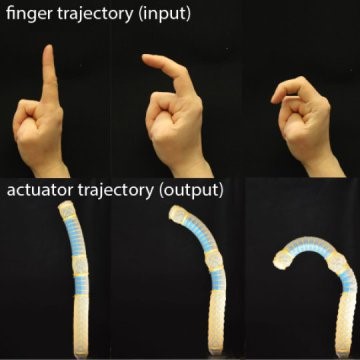
Nhóm phát triển phương pháp này sử dụng mô hình toán học của các thiết bị truyền động thủy lực, gia cố sợi để tối ưu hóa việc thiết kế một thiết bị truyền động để thực hiện một chuyển động nhất định. Nhóm nghiên cứu sử dụng mô hình này để thiết kế một robot mềm có thể uốn cong như một ngón tay và xoay như cổ tay khi được hỗ trợ bởi một nguồn điện áp duy nhất.
Nghiên cứu này sắp xếp hợp lý quy trình thiết kế robot mềm có thể thực hiện các động tác phức tạp. Nó có thể được sử dụng để thiết kế cánh tay robot di chuyển dọc theo một đường nhất định hoặc một robot có thể đeo được hỗ trợ chuyển động của tay hoặc chân.
Phương pháp mới sẽ được đưa vào Bộ công cụ robot mềm, là một nguồn tài nguyên mở trực tuyến, được phát triển tại SEAS để hỗ trợ các nhà nghiên cứu, các nhà giáo dục và các nhà sáng tạo trẻ thiết kế, chế tạo, làm mô hình, định rõ đặc điểm và điều khiển robot mềm riêng của họ.
 Về trang trước
Về trang trước Về đầu trang
Về đầu trang